
Diseño de una plataforma robótica autónoma para cirugía endoscópica endonasal
DOI:
https://doi.org/10.26507/paper.2917Palabras clave:
cirugía endonasal, ROS, cobots, cirugía mínimamente invasiva asistida por robotResumen
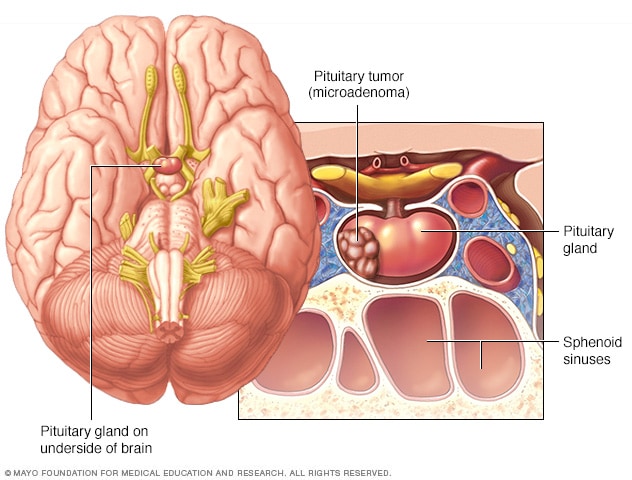
La cirugía endonasal es una técnica de cirugía mínimamente invasiva que se realiza a través de las fosas nasales para tratar trastornos de la base del cráneo. En este escenario, los robots han demostrado potencial para mejorar los procedimientos quirúrgicos al aumentar la seguridad, la precisión y la consecución de movimientos que serían difíciles de realizar en una intervención ordinaria. En este artículo se describen los avances obtenidos en el diseño de una plataforma robótica autónoma para cirugía endoscópica endonasal.
Para abordar esa tarea, se integraron el robot colaborativo UR3, el instrumental y el escenario quirúrgico en un entorno de simulación utilizando Matlab/Simulink y CoppeliaSim. Luego, se evaluó la respuesta del cobot mediante la conexión con Polyscope y una interfaz Unity mediante ROS. Finalmente, se implementaron algunos movimientos del instrumental de una cirugía endonasal para analizar su efectividad mediante un test que evaluó la respuesta del cobot UR-3e en un modelo tridimensional del cráneo humano.
En los resultados obtenidos se realizaron ejercicios en simulación usando CoppeliaSim y Matlab/Simulink para simular movimientos y trayectorias utilizando el cobot. Posteriormente, usando una plataforma diseñada en Unity, se simuló la manipulación del cobot a través de Rosbridge suite, un paquete desarrollado para establecer comunicación entre sistemas ROS. Se midieron las fuerzas y pares mediante un experimento que comparó a un operador humano con el cobot en diferentes tareas y con diferentes materiales (gelatina, plastilina, yogur), con el fin de emular las posibles texturas de un quiste, demostrando así el potencial del robot en la ejecución autónoma de estas tareas. Los resultados mostraron fuerzas y pares equivalentes entre los producidos por el operador humano versus los producidos por el robot UR-3e manipulado por la herramienta diseñada.
El uso de robots en cirugía endoscópica endonasal puede mejorar la precisión y realizar movimientos que serían difíciles de realizar en una intervención ordinaria. La medición de pares y fuerzas llevada a cabo en este trabajo muestra que un robot podría realizar la resección de un tumor ubicado en el cráneo con la misma eficacia que un cirujano. Trabajos futuros realizarán estos mismos experimentos con un acceso endonasal del robot y sobre un modelo de prueba.
Descargas
Citas
García Berro, Myriam (2004). “El futuro de la Cirugía Mínimamente Invasiva. Tendencias tecnológicas a mediano y largo Plazo,” Fundación OPTI – FENIN, Madrid, pp. 1 - 53.
H. Monnich, H. Worn, and D. Stein, (2012) “OP sense A robotic research platform for telemanipulated and automatic computer assisted surgery,” Int. Work. Adv. Motion Control. AMC, doi: 10.1109/AMC.2012.6197017.
D. T. Sugerman, (2021) Robotic surgery, vol. 310, no. 10, doi: 10.1001/jama.2013.75621.
F. Gharagozloo, V. R. Patel, P. C. Giulianotti, R. Poston, R. Gruessner, and M. Meyer, (2021). Robotic surgery, Second Ed., no. 1. Switzerland, doi: 10.15106/J00393.2012332507.
K. Correa-Arana, O. A. Vivas-Albán, J. M. Sabater-Navarro, K. Correa-Arana, O. A. Vivas-Albán, and J. M. Sabater-Navarro. (2017). “Neurosurgery and brain shift: review of the state of the art and main contributions of robotics. Neurocirugía y desplazamientos cerebrales: una revisión del estado del arte y principales contribuciones desde la robótica” vol. 20, no. 40, pp. 123–7799, [Online]. Available: http://www.scielo.org.co/pdf/teclo/v20n40/v20n40a10.pdf
D. Scorza et al., (2021). “Surgical planning assistance in keyhole and percutaneous surgery: A systematic review,” Med. Image Anal., vol. 67, doi: 10.1016/j.media.2020.101820.
Mayo Clinic, (2023). “Tumores pituitarios,” Enfermedades y afecciones. Consultado: mayo 23, 2023 en: https://www.mayoclinic.org/-/media/kcms/gbs/patient-consumer/images/2019/03/14/20/11/pituitary-tumor-8col-3802786-009-0.jpg.
Mayo Clinic, (2023). “Cirugía transesfenoidal transnasal endoscópica,” Enfermedades y afecciones. consultado mayo 23, 2023 en: https://www.mayoclinic.org/-/media/kcms/gbs/patient-consumer/images/2013/08/26/10/24/ds00478_im00169_mcdc7_transsphenoidalsurgthu_jpg.png.
Manzey, Dietrich & Strauss, Gero & Trantakis, C & Lueth, Tim & Röttger, Stefan & Bahner-Heyne, J & Dietz, Andreas & Meixensberger, J. (2009). Automation in surgery: a systematic approach. Surgical technology international. 18. 37-45.
E. Z. Goh and T. Ali, (2022). “Robotic surgery: an evolution in practice,” J. Surg. Protoc. Res. Methodol., vol. 2022, no. 1, doi: 10.1093/jsprm/snac003.
A. Shademan, R. S. Decker, J. D. Opfermann, S. Leonard, A. Krieger, and P. C. W. Kim, (2016), “Supervised autonomous robotic soft tissue surgery,” Sci. Transl. Med., vol. 8, no. 337, doi: 10.1126/scitranslmed.aad9398.
H. F. Vargas Rosero and O. A. Vivas Albán, (2020),“Robótica en cirugía y neurocirugía, aplicaciones y desafíos, una revisión,” Sci. Tech., vol. 25, no. 3, pp. 478–490, doi: 10.22517/23447214.21131.
G. A. Fontanelli, M. Selvaggio, M. Ferro, F. Ficuciello, M. Vendiuelli, and B. Siciliano, (2018), “A V-REP Simulator for the da Vinci Research Kit Robotic Platform,” Proc. IEEE RAS EMBS Int. Conf. Biomed. Robot. Biomechatronics, vol. 2018-Augus, pp. 1056–1061, doi: 10.1109/BIOROB.2018.8487187.
Y. H. Su et al., (2020), “Collaborative Robotics Toolkit (CRTK): Open Software Framework for Surgical Robotics Research,” Proc. - 4th IEEE Int. Conf. Robot. Comput. IRC 2020, pp. 48–55, doi: 10.1109/IRC.2020.00014.
Universal Robots, “Guía de configuración del entorno virtual para simular robots UR . 0.” Copyright© Universal Robots, pp. 1–29, 2020. Consultado en: mayo 29, 2023 https://academy.universal-robots.com/media/r3xlna5e/ursim_vmoracle_installation_guide_v3_es.pdf
I. LA MathWork, “Set Up URSim Offline Simulator,” Soporte, 2023. Consultado en: mayo 29, 2023 https://la.mathworks.com/help/supportpkg/urseries/ug/setup-ursim-offline-simulator.html

Descargas
Publicado
Cómo citar
Evento
Sección
Licencia
Derechos de autor 2023 Asociación Colombiana de Facultades de Ingeniería - ACOFI

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
| Estadísticas de artículo | |
|---|---|
| Vistas de resúmenes | |
| Vistas de PDF | |
| Descargas de PDF | |
| Vistas de HTML | |
| Otras vistas | |



{kind=link}
{kind=link}